Autonomous flight using on-board object tracking
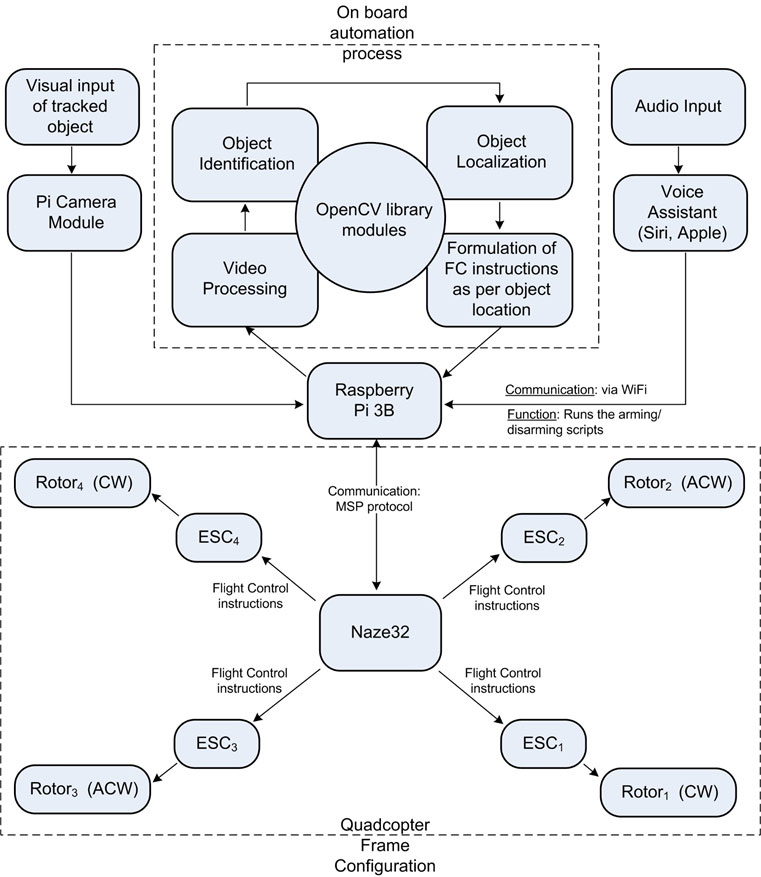
Currently, a large number of quadcopters demand continuous attention of human operator during the flight. So, in the past year we worked on making a quadcopter that could fly autonomously and follow an object without external assistance. This is done with the help of real-time object tracking and subsequent flight instructions from the on-board Raspberry Pi 3B to maintain object in frame.
 |
 |
 |
Further Reading
The project can be divided into five parts:
- Building the quadcopter.
- Communication between quadcopter and on-board Raspberry Pi.
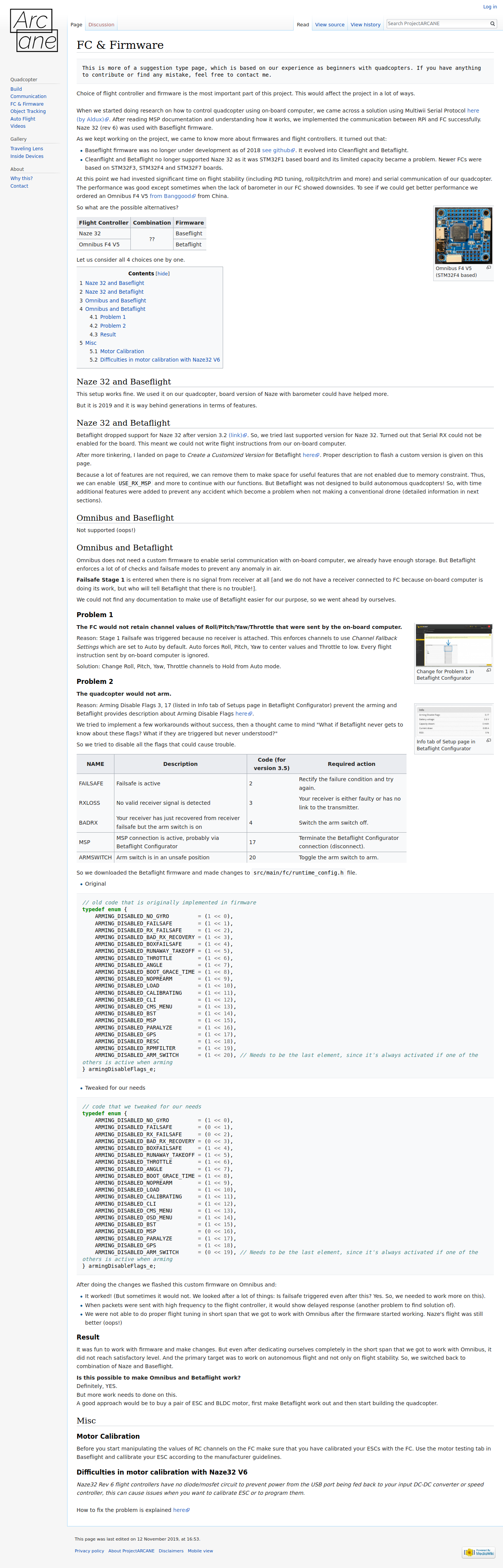
- Flight Controller and firmware.
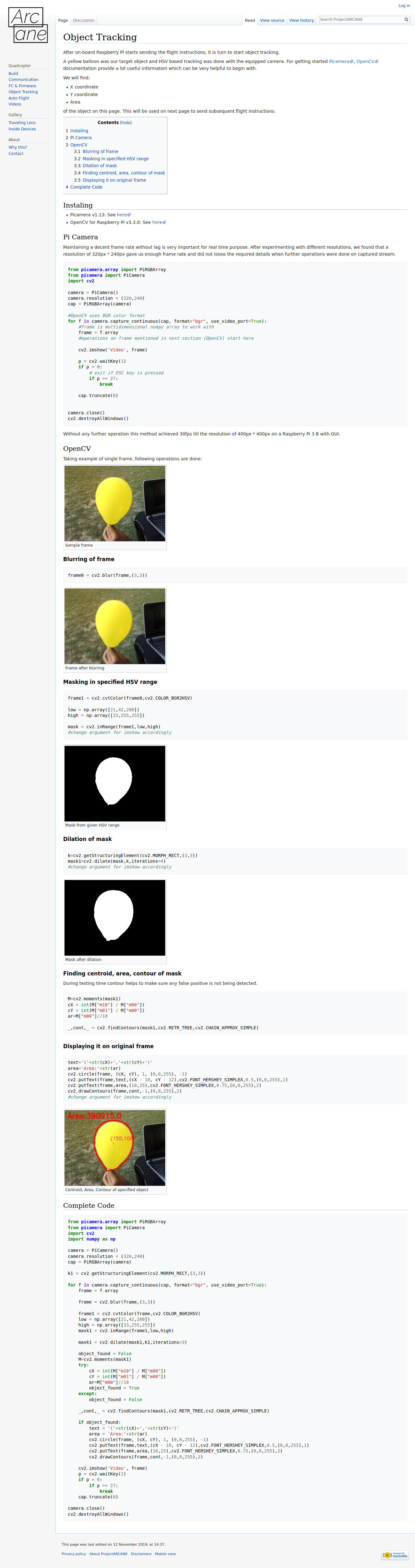
- Object tracking during flight.
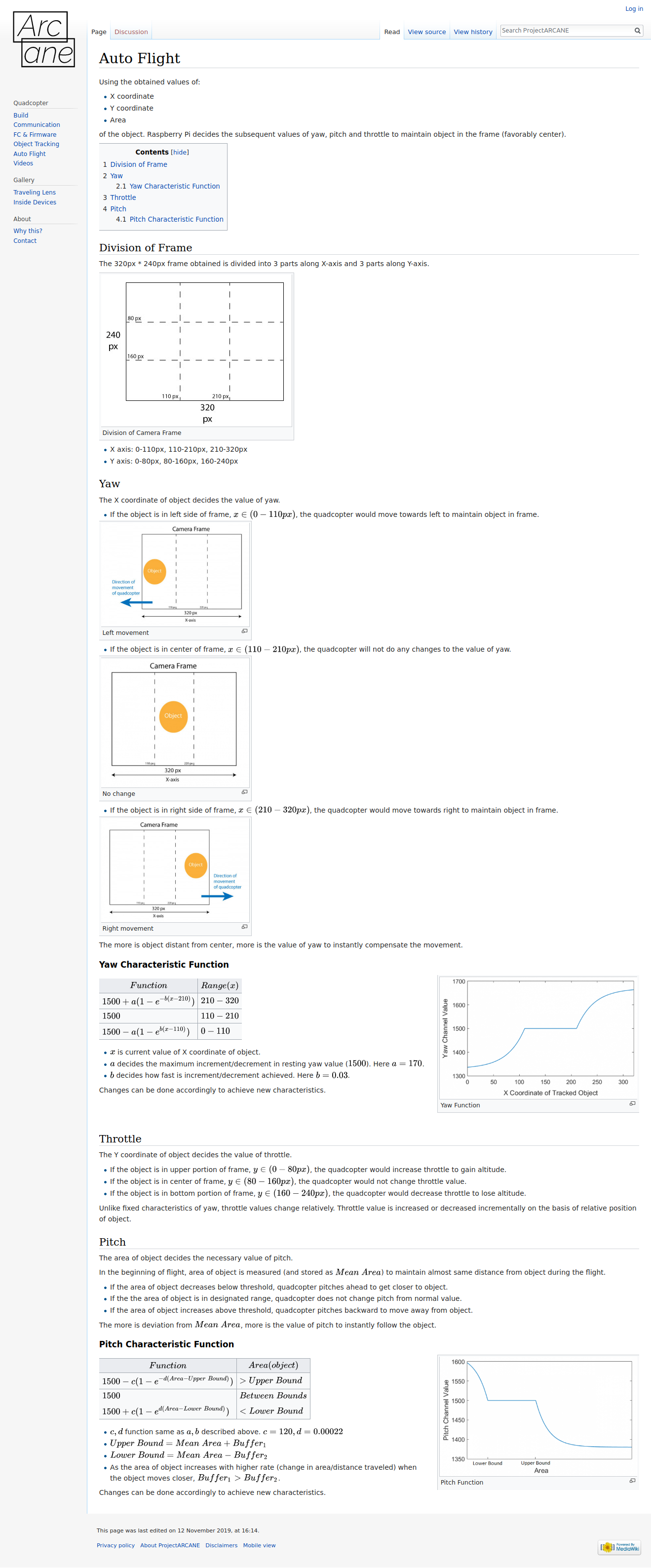
- Algorithm for adjusting yaw, pitch and throttle.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Each part contains a link to screenshot of Mediawiki Page that I wrote during that time.
I switched to Jekyll from Mediawiki, someday I will port these 5 pages too.